


RGB傳感器制導(dǎo)AGV的行走策略研究
摘要:用RGB傳感器制導(dǎo)的AGV具有控制簡單、制造成本低等特點(diǎn),可利用其行走策略的規(guī)劃來彌補(bǔ)它的行走精度等問題,并且盡量減少傳感器的數(shù)量體現(xiàn)它的特點(diǎn)。
關(guān)鍵詞:路徑規(guī)劃;行走策略;RGB傳感器;AGV
一、概述
自主導(dǎo)航輪式機(jī)器人(AGV)是上世紀(jì)50年代發(fā)展起來的智能搬運(yùn)(裝配)型機(jī)器人。AGV是現(xiàn)代工業(yè)自動(dòng)化物流系統(tǒng)中的關(guān)鍵設(shè)備之一,它是以電池為動(dòng)力,裝備電磁或光學(xué)等自動(dòng)導(dǎo)航裝置,能夠獨(dú)立自動(dòng)尋址,并通過計(jì)算機(jī)系統(tǒng)控制,完成無人駕駛及作業(yè)的設(shè)備。AGV一般采用輪式驅(qū)動(dòng),具有電動(dòng)車的特征。AGV小車能在地面控制系統(tǒng)的統(tǒng)一調(diào)度下,自動(dòng)搬運(yùn)貨物,實(shí)現(xiàn)自動(dòng)化的物料傳送。因其具有靈活性、智能化等特點(diǎn),能夠方便地重組系統(tǒng),達(dá)到生產(chǎn)過程中的柔性化運(yùn)輸之目的。較之傳統(tǒng)的人工或半人工的物料輸送方式,AGV系統(tǒng)大大減輕了勞動(dòng)強(qiáng)度和危險(xiǎn)性,提高了工作效率,在機(jī)械、電子、紡織、卷煙、醫(yī)療、食品、造紙等行業(yè)都可以發(fā)揮作用。
AGV導(dǎo)航系統(tǒng)的功能是保證AGV小車沿正確路徑行走,并保證一定行走精度。AGV的制導(dǎo)方式之一是有導(dǎo)引路線(固定路線)的方式,而固定路線的導(dǎo)引方式之一是光學(xué)控制帶制導(dǎo)方式,它利用地面顏色與導(dǎo)航帶顏色的反差來識(shí)別,如在深顏色的地面上導(dǎo)航帶為白色。AGV上裝有顏色(RGB)傳感器,均勻分布跟隨在導(dǎo)航帶及兩側(cè)位置上,檢測不同的組合信號(hào),以控制AGV的方向,使其跟蹤路軌。可以采用模糊控制算法對(duì)小車進(jìn)行控制。光學(xué)控制帶制導(dǎo)方式采用RGB傳感器作為AGV的信號(hào)輸入端,具有計(jì)算控制簡單、元器件成本低等特點(diǎn)及足夠的響應(yīng)速度和控制精度。
在自動(dòng)化車間、立體倉庫等倉儲(chǔ)物流系統(tǒng)中,AGV一般以室內(nèi)平地簡單路徑行走為主,針對(duì)這種情況,本文研究了以RGB傳感器導(dǎo)航AGV的行走控制策略問題。
二、傳感器的布局
首先,本研究的AGV是一采用兩輪獨(dú)立驅(qū)動(dòng)差速轉(zhuǎn)向的三輪實(shí)驗(yàn)小車,兩輪差速轉(zhuǎn)向是將兩驅(qū)動(dòng)輪同軸線獨(dú)立地固定于車體的兩側(cè),通過調(diào)速控制使兩驅(qū)動(dòng)輪產(chǎn)生不同的速度來實(shí)現(xiàn)轉(zhuǎn)向。在小車車體縱軸線前方裝有一個(gè)萬向輪,形成一個(gè)三輪小車的AGV,見圖1所示。
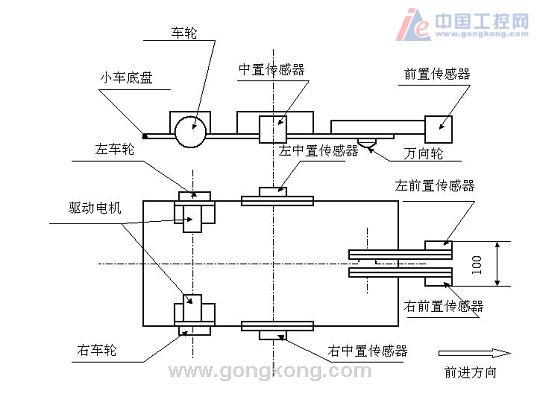
為了使AGV控制簡單、制造成本低。最初,所有RGB傳感器都被布置在小車底盤區(qū)域內(nèi),把傳感器分為兩組,沿底盤縱軸線兩側(cè)對(duì)稱布置,而且可沿底盤縱、橫軸線方向進(jìn)行調(diào)整、固定,經(jīng)過反復(fù)試驗(yàn),效果均不理想。后來,將兩組傳感器移至底盤區(qū)域外布置才滿足行走要求,如圖1所示。這種傳感器布局分為前、中兩組,每組兩個(gè)傳感器。前置傳感器位于底盤前端,且為縱軸對(duì)稱布置,它離橫軸較遠(yuǎn)是為了使小車行走有足夠的調(diào)整距離,在前置傳感器探測到離開白線的時(shí)候,偏離角度較小,可以很快糾正過來。中置傳感器位于底盤中部的橫軸上,相對(duì)于縱軸對(duì)稱。
本研究的實(shí)驗(yàn)場地模擬物流倉庫的室內(nèi)運(yùn)輸條件, 具有直線路徑、彎道、岔路口、進(jìn)入工作站等典型平面路徑。其白色導(dǎo)航帶寬度為100毫米。
三、典型路徑行走策略劃分
AGV的行走策略按照典型路徑情況,分為直線路徑行走策略、岔路口、彎道行走策略和進(jìn)入工作站行走策略。
1. 直線路徑行走策略
1)小車是否沿著直線路徑(白線)行走,由前置傳感器探測。正常情況如圖2a)所示。前置傳感器都在100mm的白線上,則小車沿著直線路徑(白線)行走。
2)在行走中,如果有一個(gè)前置傳感器偏出探測不到白線。如圖2b)所示,如前置左側(cè)傳感器探測不到白線,而右側(cè)傳感器探測到白線,則認(rèn)為小車偏左,糾正方法是使小車右側(cè)電機(jī)減速,左側(cè)電機(jī)加速,使得兩個(gè)前置傳感器回到白線位置。若小車偏右,可采用類似方法處理。
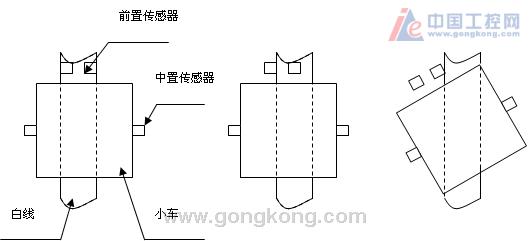
a) b) c)
圖2 小車直線路徑行走示意圖
3)如果兩個(gè)前置傳感器都在白線外,如圖2c)所示,這種情況一般是傳感器的出現(xiàn)誤判。因?yàn)槿粢粋€(gè)前置傳感器偏離白線,用2)的方法就能把小車糾正過來,根據(jù)實(shí)驗(yàn)結(jié)果,當(dāng)一個(gè)前置傳感器偏離白線的角度在5°以內(nèi),都能自動(dòng)糾正過來。通常小車的兩個(gè)電機(jī)同向轉(zhuǎn)動(dòng),由于速度的同步性誤差回造成小車行走方向有少量偏差,傳感器已經(jīng)會(huì)略微偏出白線。如果傳感器出現(xiàn)誤判,會(huì)造成兩個(gè)前置傳感器都在白線外,此時(shí),小車?yán)^續(xù)前行,可由中置傳感器檢測到白線后,根據(jù)時(shí)間的長短來判定(與彎道的情況區(qū)分開來),令小車向探測到白線的那一個(gè)中置傳感器方向轉(zhuǎn)彎,直到兩個(gè)前置傳感器回到白線上,此時(shí),耽誤的時(shí)間會(huì)略長些。
2. 岔路口、彎道行走策略
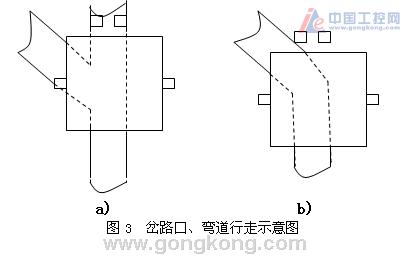
1)根據(jù)中置傳感器以及路口次序確定。前置傳感器跟隨著白色導(dǎo)航線行走,在小車前方出現(xiàn)岔路口時(shí),在短時(shí)間內(nèi)中置傳感器檢測到分岔的白線,如圖3a)所示,根據(jù)控制計(jì)算機(jī)內(nèi)存中路口的信息,能夠辨別出前方不同的路口。在辨別出路口之后,停車轉(zhuǎn)彎,直到前置傳感器找到白線,繼續(xù)前進(jìn)。
2)遇到彎道時(shí),先是前置傳感器丟失白線,如圖3b)所示,繼續(xù)前進(jìn)一段后,此時(shí),小車停止前進(jìn)向探測到白線的那一個(gè)中置傳感器方向轉(zhuǎn)彎,隨后前置傳感器也一定檢測到白線,當(dāng)兩個(gè)前置傳感器同時(shí)檢測到白線之后,判斷方向正確,停止轉(zhuǎn)動(dòng),沿此方向繼續(xù)前進(jìn)。
3. 進(jìn)入工作站策略

在每個(gè)工作站所在的地面上,有一個(gè)邊長為300mm的正方形檢測區(qū)域,如圖4所示。區(qū)域中心有線寬為50mm的白色十字線,對(duì)角線的兩個(gè)頂點(diǎn)各安裝有一個(gè)檢測距離為200mm左右的紅外傳感器。當(dāng)兩個(gè)紅外傳感器均檢測到上方有物體時(shí),物流管理系統(tǒng)計(jì)算機(jī)即認(rèn)為該AGV已經(jīng)準(zhǔn)確到達(dá)該工作站,便可進(jìn)行物流工作調(diào)度。
由于AGV小車采用的傳感器布局較分散,較難精確定位十字線。但是,可以通過規(guī)劃行走策略,使AGV小車停止在十字線上。其行走順序如下:
1)小車沿直線行走,直到前置兩個(gè)傳感器探測不到白線,小車停止前進(jìn)。
2)小車以較慢的固定速度前進(jìn),直到前置傳感器中有一個(gè)檢測到十字白線為止。這一步驟可初步定位十字線。 3)小車再減速,以更慢的固定速度前進(jìn),同時(shí)啟動(dòng)定時(shí)器,定時(shí)器超時(shí),則立刻停車。小車啟動(dòng)定時(shí)器向前慢行,不受傳感器的影響,稱為延時(shí)盲走,是為了保證了覆蓋檢測區(qū)的紅外傳感器。
4)小車到達(dá)工作站后,即可進(jìn)行相應(yīng)的物流工作,具體停留時(shí)間可另行設(shè)定。
5)當(dāng)小車完成工作站的任務(wù)后,以較慢的固定速度倒車,同時(shí)啟動(dòng)定時(shí)器,定時(shí)器超時(shí),則立刻停車。倒車距離與第三步盲走的距離等長,以免不能尋回白線。
6)小車順時(shí)針原地旋轉(zhuǎn)180º,當(dāng)右中置傳感器先探測到白線,小車?yán)^續(xù)旋轉(zhuǎn)使右中置傳感器越過白線,小車再繼續(xù)旋轉(zhuǎn)直到兩前置傳感器全都探測到白線為止。
7)尋到白線之后,小車?yán)^續(xù)以直線方式行走。
四、 行走控制策略
自動(dòng)導(dǎo)航車通過傳感器探測當(dāng)前的路徑狀況、小車當(dāng)時(shí)的工作狀態(tài)以及存儲(chǔ)器中已存儲(chǔ)的電子地圖來決定下一步動(dòng)作。控制器可采用單片機(jī),雖然實(shí)現(xiàn)較復(fù)雜的算法時(shí)編程繁瑣,因此本研究采用電子地圖的方法,以簡化計(jì)算過程。
將整個(gè)行走路徑分解為若干段典型路徑,如前所述直線、岔路口、彎道和工作站路徑等。確定每一段路徑應(yīng)當(dāng)采取的動(dòng)作,給每一段路徑一個(gè)編號(hào),將所有編號(hào)按路徑順序編制為一個(gè)列表,將該列表存于內(nèi)存中,故內(nèi)存中存有整個(gè)路徑信息,實(shí)現(xiàn)地圖的電子化。同樣,將針對(duì)每一段路徑小車應(yīng)采取的動(dòng)作進(jìn)行編號(hào)并與路徑編號(hào)一一對(duì)應(yīng),形成動(dòng)作列表,小車行走遇到什么路徑信息,控制器就從動(dòng)作列表調(diào)出相應(yīng)控制指令,控制小車的正確行走。
五、 結(jié)束語
通過用RGB傳感器制導(dǎo)AGV的行走策略實(shí)驗(yàn)、研究表明,AGV小車能按預(yù)先設(shè)定的路徑行走,而且所用的RGB傳感器數(shù)量少,單片機(jī)控制簡單,成本低。但行走精度略低,可通過進(jìn)一步研究改進(jìn)設(shè)計(jì)提高。本研究對(duì)于進(jìn)一步開發(fā)物流系統(tǒng)的AGV產(chǎn)品及相關(guān)的教學(xué)研究具有一定的意義。
[參考文獻(xiàn)]
[1] 張鐵,李琳,曾德懷.自主導(dǎo)航巡邏機(jī)器人的行走系統(tǒng)研究.廣州:機(jī)床與液壓,2003.5,37~41
[2]朱宏輝.自由路徑AGV的運(yùn)動(dòng)模擬實(shí)驗(yàn)研究.武漢:武漢理工大學(xué)學(xué)報(bào)(交通科學(xué)與工程版),2002.2
[3] Gademann, A.J.R.M.; van de Velde, S.L. Positioning automated guided vehicles in a loop layout.European Journal of Operational Research Volume: 127, Issue: 3, December 16, 2000, pp. 565~573
[4] Tahboub K A, Asada H H .Dynamics analysis and control of a holonomic vehicle with a continuously variable transmission[J].AS M E Journal of Dynamic Systems,Measure ment,and Control. 2002,124(3):118~126
[5] 王元慶.新型傳感器原理及應(yīng)用.北京:機(jī)械工業(yè)出版社,2002.5
 投訴建議
投訴建議
提交

超越傳統(tǒng)直覺,MATLAB/Simulink助力重型機(jī)械的智能化轉(zhuǎn)型

新大陸自動(dòng)識(shí)別精彩亮相2024華南國際工業(yè)博覽會(huì)

派拓網(wǎng)絡(luò)被Forrester評(píng)為XDR領(lǐng)域領(lǐng)導(dǎo)者

智能工控,存儲(chǔ)強(qiáng)基 | 海康威視帶來精彩主題演講

展會(huì)|Lubeworks路博流體供料系統(tǒng)精彩亮相AMTS展會(huì)